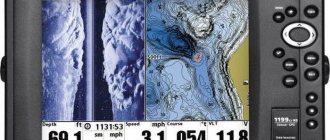
Процесс рыбной ловли становится все технологичнее и эффективнее. Этому способствует появление новых устройств, которые расширяют возможности рыбаков. Эхолот является одним из самых распространенных гаджетов, используемых в данной сфере. Чувствительные датчики сканируют подводное пространство, предоставляя пользователю нужные сведения через экран. Сегодня все большую популярность завоевывает эхолот для смартфона на «Андроиде», рабочий процесс которого требует только подключения датчика. Вся фиксирующаяся информация выводится на мобильное устройство без дополнительных электронных приспособлений.
Что представляет собой эхолот для смартфона?

Это разновидность портативных сонаров-датчиков, которые могут крепиться к леске или специальной веревке. Традиционное исполнение устройства – форма шара, в который интегрирован трансдьюсер. Использовать эхолот со смартфоном можно только с берега, поскольку на лодке, особенно в процессе движения, невозможно будет обеспечить его надежную фиксацию. Существуют модели для операционных систем iOS и «Андроид». В данном случае рассматривается второй вариант, однако все чаще изготовители предусматривают поддержку обеих систем.
Важно подчеркнуть и отсутствие проводов в системе коммуникации. Если стационарные транцевые модели имеют кабельное соединение с дисплеем, то эхолот, работающий со смартфоном, передает сигнал по каналам Bluetooth или Wi-Fi. Существуют и модификации с радиомодулями.
Три лучших модели эхолотов Deeper
| Технические характеристики | |||
| Модель | Deeper Pro+ | Deeper Pro | Deeper 3.0 |
| Цена | 19 900 руб. | 16 900 руб. | 10 900 руб. |
| Дальность приёма | 100 м | 100 м | 40-50 м |
| Размер: | диаметр 2,5″/ 6,5 см | диаметр 2,5″/ 6,5 см | диаметр 2,5″/ 6,5 см |
| Совместимость: | C iOS 8.0 и Android 4.0 до последних устройств на базе iOS и Android | C iOS 8.0 и Android 4.0 до последних устройств на базе iOS и Android | |
| Материал корпуса: | Противоударный АВС пластик | Противоударный АВС пластик | Противоударный АВС пластик |
| Вес: | 3,5 oz / 100 г | 3.5 oz / 100 г | 3.5 oz / 100 г |
| Канал связи: | беспроводная связь по каналу Wi-Fi | беспроводная связь по каналу Bluetooth до ~140-160 футов/ ~40-50 м Зависит от операционной системы и модели смартфона. | |
| Предел глубины, макс./мин.: | 260 футов (80 м) / 2 фута (0,5 м) | 130 футов (40 м) / 2 фута (0,5 м) | |
| Датчик температуры воды: | Встроенный | Датчик температуры воды | Датчик температуры воды |
| Единица измерения температуры: | градус Цельсия / градус Фаренгейта | градус Цельсия / градус Фаренгейта | |
| Эксплуатационная температура: | от -4°F до 104°F/ от -20°C до 40°C | от -4°F до 104°F/ от -20°C до 40°C | |
| Батарея: | литий-полимерная; 3,7 В; перезаряжаемая | литий-полимерная; 3,7 В; перезаряжаемая | |
| Адаптер источника питания: | 110 В / 240 В. Micro-USB. | 110 В / 240 В. Micro-USB. | 110 В / 240 В. Micro-USB. |
| Тип эхолота: | двухлучевой | двухлучевой | двухлучевой |
| GPS | Да, создание биометрических карт глубины водоема | Нет | Нет |
| Частота: | 290 kHz (15°) / 90 kHz (55°) | 290 kHz (15°) / 90 kHz (55°) | 290 kHz (15°) / 90 kHz (55°) |
| Цвет: | черный | черный | черный |
Все 3 модели эхолотов имеют право на жизнь.
Мы мечтали о плавающей платформе, семь басов! Это почти мини-басовая лодка, складная и надувная, готовая встретить прекрасные волны и сильные течения во всей безмятежности! В дополнение к основным куликам, насосам и плавникам, вы можете настроить свой поплавок по своему усмотрению, чтобы повысить эффективность и комфорт вашей рыбалки.
Вейдеры Даже если вы не холодны, кулики необходимы для поплавковой трубки. Неопреновые кулики: как гидрокостюмы или серфинг, неопреновые кулики имеют толщину, которая может варьироваться от 3 до 4, 5 мм. Подавляющее большинство неопреновых куликов имеют резиновые сапоги как обувь: эти модели обязательно запрещены для поплавковой трубки, потому что сапоги не могут вписаться в плавники. Таким образом, только несколько брендов предлагают неопреновые кулики с тапочкой в одном и том же материале. Из-за своей толщины неопрен предлагает настоящую теплоизоляцию, очень полезную для пресной воды начала и конца сезона, аналогично тому, что она немного более громоздка и может захватить рыбака.
Pro+ подкупает возможностью составлять и сохранять карту местности под водой
, что очень помогает рыболову ориентироваться на рыбалке, правильно выбирать место для прикармливания.
Модель Pro хороша наличием Wi-Fi.
Ее сигнал стабилен и никак не зависит от позиционирования телефона, дальность приема до 90 м.
Deeper 3.0
— это бюджетная версия, стоимость почти в 2 раза ниже чем у максимальной Pro+, но и здесь есть базовый набор самых важных возможностей, ведь датчик использован ровно тот же, что и у Pro+: измерение глубины, характер и рельеф дна, наличие рыбы, ее размер и глубина нахождения.
Из-за их легкости дышащие кулики предлагают настоящий комфорт для рыбалки. Все они оснащены неопреновой обувью толщиной от 4 до 5 мм, чтобы держать ногу в холодной воде. Рекомендуется использовать пару ботинок для ботинок, даже очень важно, с куликами для идеального прилегания плавников.
Выберите размер ботинок для обуви, соответствующий вашему обычному размеру обуви, ботинковые ботинки, обрезанные широкими и учитывающие толщину неопреновой обуви. Ласты Первоначальная концепция поплавковой трубки основана на движении человека, поэтому ласты необходимы для незаметного прогресса.
Принцип работы устройства

Несмотря на существенную разницу между портативными беспроводными и стационарными моделями, все эхолоты работают на основе излучения импульсов, которые обрабатываются и предоставляются пользователю в удобном виде. Тот же смартфон с помощью специального приложения графически отразит рельеф дна, покажет глубину и активность рыбы – конкретный набор сведений зависит от модели. Главным средством эхолокации является вышеупомянутый трансдьюсер. Это датчик-излучатель, посылающий сигналы к поверхности дна и принимающий отражаемые волны. В процессе работы эхолот со смартфоном могут менять параметры взаимодействия в зависимости от условий. В частности, пользователь изначально сам может настроить свойства коммуникации, но высокотехнологичные модели способны автоматически корректировать, к примеру, частоту отправки импульсов. После того как информация появилась на экране смартфона, пользователь принимает те или иные решения по изменению тактики ловли. Подобные устройства позволяют искать наиболее благоприятные места для рыбалки.
Эхолот для рыбалки своими руками
Самоделки из двигателя от стиральной машины:
1. Как подключить двигатель от старой стиральной машины через конденсатор или без него 2. Самодельный наждак из двигателя стиральной машинки 3. Самодельный генератор из двигателя от стиральной машины 4. Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат 5. Гончарный круг из стиральной машины 6. Токарный станок из стиральной машины автомат 7. Дровокол с двигателем от стиральной машины 8. Самодельная бетономешалка
Cамодельный мини-эхолот на микроконтроллере Atmel ATMega8L
и
ЖКИ от мобильного телефона nokia3310
Представляю вашему вниманию авторскую разработку – самодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310. Устройство рассчитано для повторения радиолюбителем средней квалификации, но, я думаю, конструкцию может повторить каждый желающий. Материал я старался изложить так, чтобы читателям в доступной форме дать побольше полезной информации по теме. Надеюсь, что повторение конструкции принесет Вам много удовольствия и пользы.
Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении конструкции.
С уважением, Alex
Эхолот, сонар (sonar) — сокращение от SOund NAvigation and Ranging. Эхолот известен где-то с 40-х годов, технология была разработана во время Второй мировой войны для отслеживания вражеских подводных лодок. В 1957 году компания Lowrance выпустила первый в мире эхолот на транзисторах для спортивной рыбной ловли.
Эхолот состоит из таких основных функциональных блоков: микроконтроллер, передатчик, датчик-излучатель, приемник и дисплей. Процесс обнаружения дна (или рыбы) в упрощенном виде выглядит следующим образом: передатчик выдает электрический импульс, датчик-излучатель преобразует его в ультразвуковую волну и посылает в воду (частота этой ультразвуковой волны такова, что она не ощущается ни человеком, ни рыбой). Звуковая волна отражается от объекта (дно, рыба, другие объекты) и возвращается к датчику, который преобразует его в электрический сигнал (см. рисунок ниже).
Приемник усиливает этот возвращенный сигнал и посылает его в микропроцессор. Микропроцессор обрабатывает принятый с датчика сигнал и посылает его на дисплей, где мы уже видим изображение объектов и рельефа дна в удобном для нас виде.
На что следует обратить внимание: рельеф дна эхолот рисует только в движении. Это утверждение вытекает из принципа действия эхолота. Тоесть, если лодка неподвижна, то и информация о рельефе дна неизменна, и последовательность значений будет складываться из одинаковых, абсолютно идентичных значений. На экране при этом будет рисоваться прямая линия.
Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще Вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением графического ЖК дисплея, что дает устройству преимущества в отображении полезной информации.
Вся конструкция собрана в корпусе «Z14». Питание обеспечивается от аккумулятора 9В GP17R9H. Максимальный потребляемый ток не более 30 мА (в авторском варианте 23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и настраивается под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 99,9 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Моя конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 4 м. Прибор показал отличные результаты. По мере возможности постараюсь протестировать работу эхолота на более больших глубинах, о чем будет сообщено читателям.
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке ниже:
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам? Вариант 1: приобрести готовый датчик. Вариант 2: изготовить самому из пьезокерамики ЦТС-19.
При прошивке микроконтроллера ATMega8L fuse bits выставить согласно картинке ниже :
Полная информация по изготовлению, настройке, прошивке и руководству по использованию мини-эхолота
смотрите в прилагаемом архиве!
Система энергоснабжения
Отсутствие проводов обуславливает один из главных недостатков подобных сонаров. Дело в том, что рыбалка – это длительный процесс, а автономия для беспроводной электроники всегда ограничивается несколькими часами. Датчики оснащаются аккумуляторами, средняя емкость которых составляет 500-1000 мАч. Хотя в режиме ожидания устройство может сохранять потенциальную готовность к работе в течение нескольких суток, активный формат эксплуатации расходует энергию за 8-10 часов. Это касается моделей с аккумуляторами на 700-800 мАч. Речь идет именно об усредненных показателях, поскольку на интенсивность сокращения объема батареи будут влиять и погодные условия. Например, зимний эхолот для смартфона расходует на 15-20% энергии больше, что следует учитывать. Некоторые производители также предусматривают несколько аккумуляторов в одном комплекте. Причем в зависимости от формата исполнения батареи может допускаться и возможность его подзарядки от автомобильного прикуривателя. В этом случае можно обеспечить практически безостановочный процесс сканирования, заряжая и меняя элементы питания.
ЭХОЛОТ
В. Тимофеев
Предлагаемый читателям эхолот отличается от описанных ранее (например, в журнале «Радио» № 12, 1973 г. и № 10, 1981 г.) большей глубиной измерения и наличием только одного источника питания. Для приема отраженных от дна водоема сигналов используется отдельный пьезопреобразователь, что позволяет упростить принципиальную схему эхолота и значительно облегчить его налаживание.
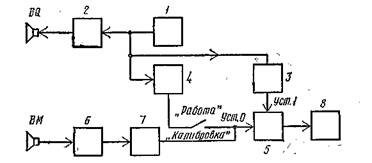
Рис. 1. Структурная схема эхолота
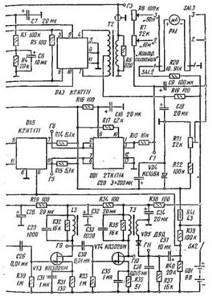
Рис. 2. Принципиальная схема эхолота
Прибор позволяет измерять глубины от 0,5 до 50 м с погрешностью, не превышающей 3…5 %. Диапазон измерений разбит на два поддиапазона: до 10 и до 50 м. На каждом из поддиапазонов имеется возможность проверки функционирования прибора по внутреннему генератору сдвинутых импульсов, имитирующих заданные глубины. Питание эхолота осуществляется от источника с напряжением 9 В, потребляемый ток не превышает 80 мА.
Структурная схема эхолота изображена на рис. 1. Тактовый генератор 1 запускает формирователь 2 зондирующих импульсов, генератор 3 парных импульсов и генератор 4 сдвинутых импульсов. Зондирующие импульсы подаются на излучатель BQ, с помощью которого преобразуются в акустический сигнал, распространяющийся в сторону дна водоема. Парные импульсы используются для Установки триггера 5 в единичное состояние. Триггер 5 устанавливается в нулевое состояние выходным сигналом приемного тракта, образованного микрофоном ВМ, принимающим отраженный от дна водоема акустический сигнал, усилителем 6 радиоимпульсов и детектором 7. В выходном напряжении усилителя 6 помимо отраженного от дна водоема сигнала будет присутствовать импульс, обусловленный влиянием наводок передающего тракта на приемный. Наведенный импульс имеет более сложную форму, чем зондирующий, и большую длительность. Его передний фронт несколько запаздывает по отношению к фронту зондирующего импульса. Поэтому он возвращает триггер в нулевое состояние сразу же после того, как тот был установлен в единичное состояние первым парным импульсом. Второй парный импульс снова устанавливает триггер в единичное состояние, а отраженный от дна эхосигнал возвращает в нулевое.
Таким образом, в течение каждого такта триггер 5 дважды устанавливается в каждое из состояний, а на его выходе будут иметь место два импульса. Первый из них имеет постоянную длительность, которая определяется временным интервалом между фронтами первого парного и наведенного импульсов. Длительность второго будет пропорциональна измеряемой глубине за вычетом постоянного расстояния, которое акустический сигнал проходит в воде за время, равное интервалу между парными импульсами. Возврат триггера в нулевое состояние наведенным импульсом приводит к возникновению систематической погрешности измерений, которая впоследствии легко может быть скомпенсирована, поскольку является постоянной на обоих диапазонах. Индикатор 8 измеряет среднее значение напряжения триггера, пропорциональное измеряемой глубине.
Генератор сдвинутых импульсов дает возможность имитировать импульсы, отраженные с глубин 10 и 40 м. Он подключается к входу установки нуля триггера в режиме проверки функционирования прибора и его калибровки. В этом режиме эхосигнал в приемном тракте должен отсутствовать, что достигается соответствующей ориентацией блока излучатель — микрофон. В рабочем режиме этот генератор от входа триггера отключается.
Принципиальная схема эхолота изображена на рис. 2, а диаграммы напряжений — на рис. 3. Тактовым генератором является автоколебательный мультивибратор DA1-Его выходное напряжение через контакты переключателя SA1.1 подается на одновибраторы DA2 и DA4, а также на дифференцирующую цепочку C10R9 (и диод VD1). Пе-Риод колебаний мультивибратора равен 66,7 мс, а длительности несимметричных полупериодов — 13,3 и 53,4 мс соответственно, что достигается подбором емкостей конденсаторов С1 и С2. Если переключатель диапазонов SA1.2 установлен в положении «10 м», то на входы одновибрато-ров и дифференцирующую цепочку с вывода 8 микросхемы DA1 подается напряжение, в котором отрицательный полупериод имеет длительность 13,3 мс (рис. 3, диаграмма Г1). Одновибраторы запускаются отрицательным перепадом входного напряжения, а сформированный дифференцирующей цепочкой короткий положительный импульс будет задержан по отношению к началу такта на 13,3 мс, что равно времени распространения акустического сигнала до глубины 10 м и обратно. На диапазоне «50 м» входное напряжение на одновибраторы и дифференцирующую цепочку подается с вывода 14 микросхемы DA1. В этом случае отрицательный полупериод имеет длительность 53,4 мс, а сформированный дифференцирующей цепочкой импульс будет задержан на время, равное приходу эхосигнала с глубины 40 м.
Рис. 3. Диаграммы напряжений
Формирователь зондирующих импульсов состоит из сд-новибратора DA2 и генератора радиоимпульсов заполнения с усилителем мощности, выполненных на микросхеме ВАЗ. Одновибратор DA2 формирует положительный импульс (рис. 3, диаграмма Г2), длительность которого т определяет время работы генератора радиоимпульсов. Необходимую длительность % устанавливают подбором емкостей конденсаторов СЗ и С4. Генератор радиоимпульсов выполнен на одном из транзисторов микросхемы DA3 (выводы 9, 10, 11). Частота генерации fген определяется индуктивностью первичной обмотки трансформатора Т1 и емкостью шунтирующего ее конденсатора Сб.
Необходимые значения т и fген определяются геометрическими размерами применяемых пьезоэлементов и свойствами материала, из которого они изготовлены. Для использования в данном приборе пригодны пьезоэлементы из керамики на основе титаната бария или цирконата-ти-таната свинца (ЦТС-19, ЦТС-23) в виде дисков с диаметром 25…35 мм и толщиной 8…15 мм, поляризованные в продольном направлении. Частота основного резонанса продольных колебаний свободных дисков определяется формулой
где б — толщина диска, м; Е — модуль упругости пьезо-керамики, Н/м2; р — плотность пьезокерамики, кг/м3.
Для титаната бария Е — 1,1 1011 Н/м2, р — 5,5 X X 103 кг/м3, а для керамик ЦТС-19 и ЦТС-23 Е = 0,72 х 1011 Н/м2, р – 7,3 103 кг/м3.
Так как пьезоэлементы в процессе изготовления излучателя и микрофона устанавливаются на резиновых подложках и заливаются эпоксидной смолой, то значения резонансных частот могут снизиться на 20…30 %. Это необходимо учесть при настройке генератора зондирующих импульсов, определив действительное значение резонансной частоты изготовленных излучателя и микрофона экспериментальным путем. Для удовлетворительной работы приемного тракта необходимо, чтобы эхосигнал содержал не менее 12…15 высокочастотных колебаний. Таким образом, длительность зондирующего радиоимпульса т может быть определена из условия: г — (12…15)/fрез.д, где fрез.д — действительное значение резонансной частоты излучателя и микрофона. Исходя из сказанного, можно ожидать, что действительные значения резонансных частот будут находиться в пределах от 70 до 220 кГц, а длительности зондирующих импульсов — от 70 до 280 мкс.
Усилитель мощности выполнен на двух транзисторах микросхемы DA3 (выводы 3, 4, 5 и 6, 7,  по обычной двухтактной схеме. Резисторы R5 и RS, шунтирующие вторичные обмотки трансформаторов 77 и Т2, служат для уменьшения времени спада радиоимпульса. Выходное напряжение генератора зондирующих импульсов (рис. 3, диаграмма ГЗ) должно иметь амплитуду не менее50 В. Через разъем XI оно подается на излучатель BQ.
по обычной двухтактной схеме. Резисторы R5 и RS, шунтирующие вторичные обмотки трансформаторов 77 и Т2, служат для уменьшения времени спада радиоимпульса. Выходное напряжение генератора зондирующих импульсов (рис. 3, диаграмма ГЗ) должно иметь амплитуду не менее50 В. Через разъем XI оно подается на излучатель BQ.
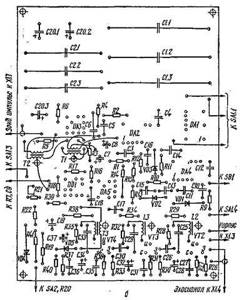
Рис. 4. Печатная плата эхолота:
о — печатный монтаж; б — расположение элементов
Генератор парных импульсов содержит одновибратор DA4, две дифференцирующие цепочки C13R10 и C14R11, а также усилитель видеоимпульсов, выполненный на одном из транзисторов микросхемы DA5 (выводы 9, 10, 11). В дифференцирующие цепочки включены диоды VD2 и VD3 для ограничения импульсов отрицательной полярности. Положительные импульсы на выходах цепочек будут сдвинуты относительно друг друга на время, равное длительности импульса одновибратора, поскольку цепочки подключены к его разнополярным выходам (выводы 5, 10). Усилитель видеоимпульсов является одновременно и смесителем выходных импульсов дифференцирующих цепочек. На диаграмме Г4 показан один из выходных импульсов одновибратора DA4, а на диаграмме Г5 — парные им-пульсы с выхода видеоусилителя.
Генератор сдвинутых импульсов содержит дифференцирующую цепочку C10R9 и усилитель видеоимпульсов, выполненный на втором транзисторе микросхемы DA5 (выводы 6, 7, 8). Этот усилитель является одновременно и выходным усилителем приемного тракта. Выходные импульсы дифференцирующей цепочки подаются на вход видеоусилителя через контакты переключателей SA1, SB1 и конденсатор СП.
Приемный тракт образован микрофоном ВМ, усилителем радиоимпульсов VT1 — VT4, детектором VD5 и видеоусилителем на микросхеме DA5. Усилитель радиоимпульсов состоит из одного широкополосного дроссельного каскада VT1 и трех узкополосных резонансных. Межкаскадные связи в усилителе радиоимпульсов емкостные. Детектор выполнен по однополупериодной схеме. Выходные напряжения каскадов усилителя радиоимпульсов представлены на диаграмме Г8 — ПО, а выходные напряжения всего тракта — на диаграмме Г6.
На единичный вход триггера DD1 (выводы 7, в течение каждого такта подаются два импульса (парные импульсы). По входу установки нуля (выводы 2, 4) триггер может управляться одним или двумя импульсами. В зависимости от этого триггер может работать в двух режимах, что иллюстрируется двумя диаграммами Г7. Если триггер управляется не только наведенным импульсом, который всегда присутствует в выходном сигнале приемного тракта, но и эхосигналом, то в течение такта в каждое из состояний триггер устанавливается по два раза. Работа триггера не изменится, если вместо эхосигнала использовать один из сдвинутых импульсов. В этих случаях выходное показание проградуированного индикатора будет соответствовать реальной или имитированной глубине. В отсутствие эхосигнала и имитирующего импульса в каждое из состояний в течение такта триггер устанавливается только по одному разу: наведенным сигналом и вторым парным импульсом, а выходное показание индикатора будет равно максимально измеряемой глубине, т. е. 50 м.
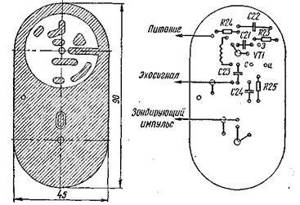
Рис. 5. Печатная плата дроссельного усилителя
Выходное напряжение на индикатор снимается с вывода 1, который обычно является инверсным выходом триггера. Резисторы R18, R7 и R8 служат для установки необходимых сил токов индикатора РА1 на соответствующих диапазонах измерений. На отрицательную клемму индикатора подается напряжение смещения с делителя R21, R22. Оно предназначено для компенсации систематической погрешности, возникающей за счет возврата триггера в нулевое состояние наведенным импульсом, а также из-за отличия от нуля выходного напряжения триггера в том случае, когда он находится в нулевом состоянии. Для пре-дхгвращения дрожания стрелки индикатора используется конденсатор С9. С помощью индикатора осуществляется также контроль напряжения питания эхолота. Напряжение источника питания GB1 подается на индикатор через добавочный резистор R20.

Рис. 6. Внешний вид эхолота
Напряжение питания части узлов прибора стабилизировано с помощью параметрического стабилизатора VD4.
Монтаж прибора выполнен на плате из фольгированно-го с одной стороны стеклотекстолита толщиной 1,5 мм. Печатный монтаж и расположение элементов на плате показаны на рис. 4. Первый каскад усилителя радиоимпульсов смонтирован на плате из двустороннего фольгирован-ного стеклотекстолита толщиной 2…3 мм (рис. 5), на который также устанавливаются излучатель и микрофон.
Фольга на второй стороне этой платы не травится для луч-шего экранирования блока излучатель — микрофон. Размеры платы даны в предположении, что излучатель и микрофон изготовлены с использованием пьезоэлектрических дисков диаметром 30 мм. При использовании других дисков размеры платы следует пропорционально уменьшить или увеличить.
В конструкции эхолота использованы следующие радиодетали. Постоянные резисторы — М ЛТ, переменные R7 и R8 — СПО-1, подстроечный резистор R21 — СПЗ-б. Полярные электролитические конденсаторы — К50-6 и К50-9 на напряжение 10 В.
Конденсаторы C1, C2 — К76-П1 или К76-2; конденсаторы С5, С6, С25, С29 СЗЗ — ПМ-2 или ФТ-2; остальные — КМ-5 или КМ-6. Переключатель SA1 — галетный на 3 положения и 4 направления, SB1 — кнопочный с фиксацией, SA2 — микротумблер MTl Трансформаторы и дроссели выполнены на тороидальных сердечниках из феррита 1000НМ или 1000НН. Трансформатор Т2 намотан на сердечнике К17.5 X 8, 2×5, а для изготовления остальных моточных изделий пригодны сердечники К10 X 6 X 4,5 или К12 X 8 X 3. Трансформатор T1 имеет в первичной обмотке 80 витков с отводом от 60 витка, а во вторичной — по 5 витков в каждой секции. Трансформатор Т2 в каждой секции первичной обмотки имеет по 30 витков, а вторичная имеет 160 витков. Трансформатор ТЗ имеет в первичной обмотке 60, а во вторичной 90 витков. Дроссели LI, L2, L3 одинаковые и имеют по 100 витков каждый. Все моточные изделия выполнены проводом ПЭВ-2 диаметром 0,16 мм. Разъем XI — четырехштырь-ковый из серии 2РМ или РС4. В качестве источника питания используются два элемента 3336Л или 6 элементов 373. Индикатором может служить практически любой микроамперметр с током полного отклонения 50 или 100 мкА. На нем следует изготовить две равномерные шкалы в соответствии с диапазонами измерения и нанести отметку контроля питания. Прибор выполнен в металлическом корпусе размером 240 X 160 X 70 мм (рис. 6). На переднюю панель выведены индикатор РА1, коммутационные устройства, резисторы R7, R8 и разъем XI. Резистор R20 и конденсатор С9 монтируются на переключателе SA1.
Рис. 7. Конструкция блока излучатель — микрофон
Излучатель BQ, микрофон ВМ и первый каскад усилителя радиоимпульсов выполнены в виде отдельного блока, соединенного с эхолотом кабелем. Конструкция этого блока (рис. 7) обеспечивает электрическую и акустическую изоляцию микрофона от излучателя. Блок изготавливают следующим образомг. К каждой из сторон двух одинаковых пьезозлементов 1, взятых из одной партии, с необходимыми предосторожностями припаивают по три отрезка провода МГТФ-0,1 или 0,14 длиной по 60 мм. Места паек должны быть у края пьезоэлемента и располагаться по окружности равномерно. Клеем «88» или «Момент» к каждому пье-зоэлементу приклеивают по шайбе 2, изготовленной из микропористой резины. Диаметр шайб равен диаметру пъезо-элементов, а толщина — 5…8 мм. После высыхания клея припаянные к пьезоэлементам выводы собирают в косу на стороне резиновой шайбы и связывают тонкими хлопчатобумажными нитками. Ось косы должна совпадать с осью пьезоэлемента. Припой в местах паек на свободной стороне пьезоэлементов, которая будет являться рабочей, должен иметь одинаковую высоту. Следует проконтролировать это с помощью щупа и при необходимости снять излишки припоя надфилем или наждачной бумагой. Пьезоэлементы с шайбами заливают эпоксидной смолой в цилиндрических стаканах, согнутых из полос алюминия толщиной 1 мм. Внутренний диаметр стаканов должен быть на 3…4 мм больше диаметра пьезоэлементов, а высота на 4…5 мм больше высоты пъезоэлементов вместе с шайбами. Перед заливкой внутренние поверхности стаканов следует смазать машинным маслом для предотвращения приклеивания стаканов, а наружные поверхности пьезоэлементов обезжирить. Заливку осуществляют на ровном основании, положив на него лист органического стекла. На стекло устанавливают стаканы, фиксируя их положение пластилином. Пластилин предотвращает также вытекание смолы. В каждый из стаканов на треть их высоты наливают приготовленную эпоксидную смолу и в нее погружают пьезоэлементы с шайбами, ориентируя их положение относительно стаканов. Затем добавляют смолу до заполнения стаканов, от которых после затвердения смолы освобождаются. Изготовленные таким образом цилиндры обеспечивают полную герметичность пьезоэлементов и обладают практически одинаковыми резонансными свойствами.
Из латуни толщиной 1,6 мм изготавливают защитные стаканы 3, высота которых на 10… 12 мм больше высоты залитых цилиндров. Внутренняя поверхность этих стаканов оклеивается вакуумной резиной 4 толщиной 1,5 или 2 мм. Внутренний диаметр обрезиненных стаканов должен быть на 2…3 мм больше диаметра залитых цилиндров. В обрезиненных стаканах выполняют по одному отверстию диаметром 8 мм, через которые происходит вытеснение воздуха при погружении блока в воду. Отверстия выполняются на таком уровне, чтобы пьезоэлементы полностью находились в воде. Затем к нижней стороне платы 6 приклеивают шайбы 5, имеющие отверстия в центрах и изготовленные из вакуумной резины толщиной 3…4 мм. Их диаметр должен быть равен внутреннему диаметру обрезиненных стаканов. К шайбам приклеивают залитые цилиндры, пропуская выводы пьезоэлементов через отверстия в шайбах и плате. Приклейку шайб и цилиндров осуществляют на ровном основании с использованием прижимных грузов, что обеспечивает параллельность рабочих поверхностей излучателя и микрофона. После высыхания клея на плату 6 устанавливают обрезиненные защитные стаканы, припаивая их по периметру. После этого производят распайку выводов излучателя и микрофона, монтируют элементы усилителя VT1 (на рис. 7 этот усилитель обозначен позицией 7) и припаивают проводники кабеля 8. На плате 6 не имеется отверстий для установки радиоэлементов. Их монтаж осуществляется на контактных площадках. Последующая заливка этой стороны платы эпоксидной смолой обеспечит необходимую фиксацию проводников и радиоэлементов. Выводы, припаянные к рабочей стороне пьезоэлементов, следует соединить с корпусной контактной площадкой. Сигнальными являются выводы, припаянные к той стороне, к которой приклеена шайба 2. Эта мера обеспечивает лучшее экранирование микрофона. Корпусная контактная площадка соединяется с фольгой на обратной стороне платы через отверстие. Кабель 8 должен иметь длину не менее 2…2,5 м для удобства обращения с эхолотом при измерении глубины в различных условиях. Оплетки экранированных проводов припаивают к корпусной контактной площадке. Все проводники кабеля должны быть заключены в резиновую трубку. Перед заливкой платы следует проверить работоспособность излучателя и микрофона с усилителем. Эта проверка осуществляется во время настройки прибора.
Для настройки эхолота помимо ампервольтметра потребуется осциллограф и ровный металлический лист любой толщины размером 200 X 200 мм, выполня-5ощий роль отражателя акустических сигналов. Настройку и калибровку прибора на обоих диапазонах производят в воздухе, что возможно благодаря использованию для приема акустических сигналов отдельного микрофона.
Настройку начинают с подбора требуемого сопротивления резистора R20. При этом переключатель SA1 должен быть установлен в положение «Контр, питания». Подбором резистора R20 добиваются, чтобы показание индикатора на шкале диапазона «10 м» соответствовало значению напряжения источника питания GB1. В дальнейшем индикатор РА1 с добавочным резистором может быть использован в качестве вольтметра при определении постоянных напряжений в различных точках схемы. Для этого от выключателя SA2 отпаивают провод, ведущий к резистору R20, и пользуются этим проводом как щупом. Стабилизатор VD4 должен обеспечивать на выходе напряжение 6,3 В ± 10 %, причем оно должно оставаться неизменным при понижении напряжения источника GB1 до 8 В. Желательно стабилитрон и резистор R41 подобрать отдельно, а затем установить на плату.
Напряжение питания микросхем подается со стабилизатора VD4 (за исключением коллекторного питания двух транзисторов сборки DA3, на которых выполнен усилитель мощности). Следует проконтролировать наличие этих напряжений на соответствующих выводах микросхем. На выводах 6 и 10 триггера DD1 напряжения должны быть равны 6В±10%иЗВ ±10% соответственно. Если это не соблюдается, то следует соответствующим образом подобрать резисторы R16 и R17. Контролируют также наличие напряжений питания каскадов VT1 — VT4 усилителя радиоимпульсов, которые должны быть равны 5, 6, 7 и 8 В соответственно.
Затем переключатель диапазонов устанавливают в положение «10 м» и приступают к настройке схемы с помощью осциллографа. Осциллограф используется в режиме внешней синхронизации, а синхронизирующее напряжение снимается с ламели переключателя SA1.1, соединенной с входами микросхем DA2, DA4 и дифференцирующей цепочной C10R9. Последовательно подключая вход осциллографа к гнездам Г1 — Г4, контролируют работу микросхем DAl, DA2, DA4 и генератора зондирующих импульсов.
Убедившись в работе этих узлов, окончательную установку необходимых длительностей их выходных импульсов откладывают до настройки генератора зондирующих импульсов и узлов приемного тракта. Для такой настройки блок излучатель — микрофон устанавливают в полуметре от металлического листа таким образом, чтобы рабочие поверхности излучателя и микрофона были параллельны плоскости листа. Вход осциллографа присоединяют к затвору транзистора VT2. Подбором конденсатора С6 добиваются такой частоты заполнения зондирующего импульса, при которой эхосигнал имеет максимальную амплитуду. Максимум эхосигнала будет свидетельствовать о том, что частота заполнения зондирующего импульса совпадает с резонансной частотой излучателя и микрофона. Амплитудно-частотная характеристика дроссельного усилителя VT1 в диапазоне возможных значений резонансных частот близка к равномерной и не окажет влияния на правильность настройки генератора при использовании пьезоэлементов любых указанных выше размеров. Целесообразно проверить правильность настройки генератора по поведению амплитуды зондирующего импульса при изменении частоты его заполнения в окрестностях найденного резонанса. Амплитуда зондирующего импульса на частоте резонанса излучателя будет минимальной, поскольку на резонансной частоте механических колебаний пьезопреоб-разователя модуль его комплексной электрической проводимости принимает максимальное значение. Подбором емкости конденсаторов СЗ и С4 добиваются, чтобы зондирующий импульс содержал 12…15 периодов высокочастотных колебаний. Если задний фронт зондирующего импульса затянут более чем на 5…7 периодов высокочастотных колебаний, следует уменьшить сопротивление резистора R6.
Последовательно подключая вход осциллографа к гнездам Г8 — Г11, настраивают каскады усилителя радиоимпульсов и детектор. Усилитель радиоимпульсов является наиболее ответственным звеном эхолота, и его настройке необходимо уделить особое внимание. Коэффициент усиления должен быть таким, чтобы на экране осциллографа можно было уверенно различить эхосигнал, полученный в воздухе с расстояний до 10 м, а триггер DD1 без сбоев установить в нулевое состояние эхосигнал ом, полученным с расстояния 2,5…3 м. При этом усилитель не должен возбуждаться, а усиленное напряжение собственных шумов
микрофона не должно оказывать влияния на работу триггера. При настройке усилителя необходимо стремиться, чтобы длительность наведенного импульса не превышала 2т, поскольку именно она определяет минимальную границу измеряемых глубин. Второй парный импульс, возвращающий триггер в единичное состояние, можно подавать только после наведенного импульса. В противном случае триггер под действием последнего может вновь возвратиться в нулевое состояние и в его выходном напряжении не будет импульса, длительность которого пропорциональна измеряемой глубине. Следовательно, эхолот не будет измерять глубин, с которых эхосигнал придет раньше второго парного импульса. Величина этой «мертвой зоны» целиком определяется длительностью наведенного импульса. Уменьшить ее можно шунтированием выхода микрофона резистором, подобрав его сопротивление опытным путем (на принципиальной схеме этот резистор отсутствует). Это необходимо делать при погруженном в воду блоке излучатель — микрофон, поскольку механические колебания микрофона в воздухе будут отличаться от колебаний в воде за счет различия в акустических импедансах этих сред. Блок ставят на дно емкости рабочими поверхностями вниз и наливают в нее воду до уровня центров отверстий в защитных стаканах, избегая попадания воды на незалитый смолой монтаж усилителя VT1.
Подбором емкости конденсаторов СИ, С12 устанавливают необходимую длительность выходного импульса одновибратора DA4, которая определяет интервал между парными импульсами. Второй парный импульс должен запаздывать относительно спада наведенного импульса на 150…200 мкс.
Амплитуды импульсов, поступающих на нулевой и единичный входы триггера, должны быть не менее 5 В, что обеспечивает устойчивость его работы.
Последующую настройку производят снова на воздухе. Цепь прохождения имитирующих импульсов проверяют на обоих диапазонах в отсутствие эхосигнала. Эти импульсы подаются на нулевой вход триггера при нажатой кнопке SB1.
Необходимые длительности полупериодов мультивибратора DA1 подбирают следующим образом. Переключатель диапазонов устанавливают в положение «10 м», а блок излучатель — микрофон располагают на расстоянии 2,33 м от металлического листа. Ориентирование диаграммы направленности осуществляют, контролируя по осциллографу выходное напряжение усилителя радиоимпульсов. Максимальная амплитуда эхосигнала будет свидетельствовать о правильной ориентации блока. Подбором емкости конденсатора С2 добиваются, чтобы положительный перепад выходного напряжения мультивибратора совпал с началом эхосигнала. Длительность второго полупериода устанавливают подбором емкости конденсатора С1, увеличив расстояние между блоком излучатель — микрофон и листом до 9,3 м, что соответствует глубине 40 м. При этом переключатель диапазонов должен быть в положении «50 м». Для каждого из конденсаторов Cl, C2 на печатной плате имеются по три установочных места, что дает возможность подбирать требуемый номинал параллельным соединением конденсаторов.
После настройки передающего и приемного трактов убеждаются в правильности работы триггера в присутствии эхо-сигнала с расстояния 0.5…1 м, без эхосигиала и с имитирующими импульсами, которые подают на вход триггера в отсутствие эхосигнала.
Настройка эхолота заканчивается регулировкой делителя R21, R22, которую производят следующим образом. Переключатель диапазонов устанавливают в положение «10 м», а блок излучатель — микрофон располагают на расстоянии 233 мм от листа, что соответствует глубине 1 м. Регулировкой резистора R21 устанавливают стрелку индикатора на отметку 1 м. Затем расстояние увеличивают до 2,33 м и резистором R7 устанавливают стрелку на отметку 10 м. Снова устанавливают расстояние 233 мм и резистором R21 возвращают стрелку на отметку 1 м. Путем нескольких перестановок добиваются, чтобы показания индикатора соответствовали измеряемому расстоянию. Разбив расстояние 2,33 м на десять равных частей и обозначив полученные отметки цифрами 0, 1, 2, 3…, получают «воздушный эквивалент» шкалы глубин от 0 до 10 м, с помощью которого проверяют правильность показаний эхолота. Проверку показаний на диапазоне «50 м» производят только на расстояниях, с которых отраженный от листа эхосигнал имеет достаточную амплитуду для возвращения триггера в нулевое состояние. Перед проверкой диапазона следует в отсутствие эхосигнала резистором R8 установить стрелку индикатора на отметку 50 м и проверить его показание при нажатой кнопке SB1, которое должно быть равно 40 м.
После этого на блок излучатель — микрофон (см. рис.7) устанавливают экран 9, припаивая его к плате 6 в нескольких точках, и заливают смолой. Экран изготавливают из листа латуни толщиной 0,5…0,8 мм. В смолу следует залить также и кронштейн, предназначенный для закрепления блока на месте его работы.
Установленные на печатной плате трансформаторы и дроссели следует пропитать лаком, а саму плату покрыть им с обеих сторон. Защита радиоэлементов от действия влаги, использование во времязадающих цепях высокостабильных конденсаторов и стабилизация напряжения питания микросхем обеспечивают заданные метрологические характеристики эхолота. Тщательное выполнение и настройка прибора обеспечивают его высокую надежность при работе в различных климатических условиях.
Перед началом работы с прибором следует убедиться в правильности его функционирования во всех режимах, что гарантирует достоверность результатов последующих измерений. Эту проверку производят в воздухе, используя в качестве отражающего элемента любые имеющиеся поблизости плоские предметы: доски, ровную поверхность земли или воды, корпус самого эхолота и др. Установив блок излучатель — микрофон на расстоянии 0,5…1 м от отражающей поверхности, проверяют показания индикатора на обоих диапазонах. Эти показания в 4,3 раза превышают установленное расстояние. Затем блок располагают таким образом, чтобы отраженный сигнал отсутствовал. При этом на диапазоне «10 м» стрелка индикатора должна зашкаливать, а при нажатии кнопки SB1 — устанавливаться на отметке 10 м. На диапазоне «50 м» показание индикатора РА1 должно равняться предельному значению измеряемой эхолотом глубины, т. е. 50 м, а при нажатой кнопке — 40 м.
Для поддержания точности эхолота на заданном уровне в процессе эксплуатации целесообразно периодически контролировать его калибровку, сравнивая длительности полупериодов колебаний мультивибратора DA1 с временем прихода эхосигнала в воздухе с расстояний 2,33 и 9,3 м.
Литература
БокитькоВ., БокитькоД. Портативный эхолот. — Радио, 1981, № 10, с. 23 — 25.
Кравченко А. Транзисторный эхолот. — Радио, 1973, № 12, с. 15, 16.
OCR Pirat
Tweet Нравится
- Предыдущая запись: ЭЛЕКТРОДВИГАТЕЛЬ-Диск
- Следующая запись: ЭЛЕКТРОАКУСТИЧЕСКИЙ КОМПЛЕКС «ЭДЕЛЬВЕЙС»
- Блок finally (0)
- Функции класса (0)
- Параметры ref и out (0)
- Язык ассемблера примеры комманд (0)
- Особенности разработки микроконтроллеров (0)
- Контроллеры на основе микросхем FPGA (1)
- ТЕХНОЛОГИЧЕСКИЕ СОВЕТЫ ПРИ ИЗГОТОВЛЕНИИ И ОРИЕНТИРОВАНИИ ТЕЛЕВИЗИОННОЙ АНТЕННЫ (0)
Похожие посты:
Основные характеристики датчика

Эффективность работы устройства в первую очередь определяется его мощностью. У портативных сонаров она редко превышает 300 Вт. Модели с таким потенциалом оптимально подойдут для обычной ловли с берега при дальности заброса порядка 30-40 м. Мощность влияет на глубину обнаружения, которая может достигать от нескольких десятков до сотен метров – в диапазонах 40-500 м работает большинство моделей. На дальность излучения повлияет и частота. Чем она ниже, тем выше радиус действия. К примеру, 50 кГц обеспечат те самые 500 м. Но важно учитывать, что на функцию беспроводного датчика эхолота для смартфона повлияют и характеристики воды. Так, в условиях повышенной минерализации глубина мониторинга может сократиться вдвое. При этом не стоит ориентироваться исключительно на мощность с частотой. Важен и угол сканирования, который в среднем варьируется от 15° до 45°. Это величина охвата подводного пространства – соответственно, от узкого поля к широкому.